
品牌
其他厂商性质
北京市所在地
刚体在空间中的位置和方向可以用六个参数来描述:三个位置坐标(x、y和z),产生一个特定点的位置,以及三个姿态角(滚转、俯仰和偏航),提供空间中的方向。使用六自由度(6DOF)也称为6维(6D)运动跟踪,仅使用单个摄像机就可以计算、表达和分析空间中刚体的位置和方向。六自由度分析模块可作为跟踪眼的一个选项,并可与三维立体扫描仪的使用相结合进行进一步分析。
主要优势
易于使用,模块化
无限数量的可跟踪点
多种跟踪算法
市场上确的解决方案
创建模板的可能性
各种表格和图像导出格式
与所有主要高速摄影机兼容
应用示例

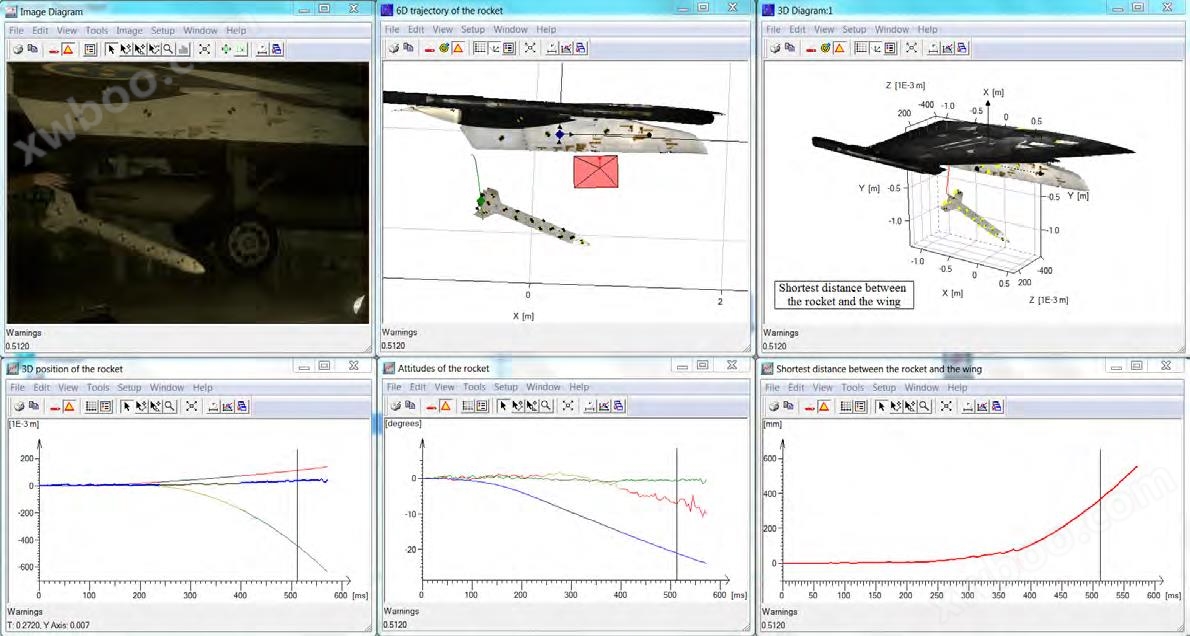
一枚3D打印火箭和一架鹰狮战斗机已经通过3D模型模块(可选)进行了3D扫描,并被导入TrackEye。密集模型提供了对刚性物体的任何点的3D位置的访问,甚至是部分掩蔽的。这一特性与6DOF分析相结合,允许操作者在悬挂物分离过程中恢复火箭的全部性能。
相机的振动通过使用飞机上的测量点的动态相机定向来补偿。x、y、z位置以及悬挂物相对于飞机的横摇、俯仰、偏航姿态可以用各种图表表示。
最后,使用3D模型中的密集数据集,分析包允许动态计算3D对象之间作为时间函数的最短距离。这可以作为一个3D对象上的特定单点与另一个3D对象之间的最短3D距离,或者两个3D对象之间的最短3D距离来完成。后者将涉及两个3D对象上的许多不同点
对于储存分离,空间通常是非常有限的和短焦距镜头是必要的,以便能够观察火箭在一个大的视野。这些透镜通常会受到失真现象的影响,为了在6ds的结果中保持准确性,必须从中修正。图像系统的校准板允许校准和校正失真。径向失真表、失真系数以及考虑固定焦点的光学实际焦距是一些可用的输出。
更多应用
汽车工业
跟踪底座
弹道学
。。。。













